
SU7“人、车、家”合一的生态互联与路凯智行“懂车、懂矿、懂算法”的不谋而合
就在几天前,要押上一生的荣誉和成就,进行人生最后一次创业的雷军对外发布了小米SU7。就是想“交个朋友”的价格以及全栈自研的智能驾驶算法技术让SU7“好看又能打”。

2021年,就在雷军官宣进军新能源汽车的数月之后,由其创立的顺为资本领投路凯智行Pre-A轮融资。路凯智行是专注于矿山场景的无人驾驶企业,已实现L4级别无人驾驶的商业化落地。可以确定的是,小米汽车L2+级别的智能驾驶和路凯智行L4级别无人驾驶,因为场景的不同将各自面临不同的技术难点。单以无人驾驶技术而言,矿山场景下,无人驾驶在感知、定位、规划、控制4个层面分别面临不同的挑战。
无人驾驶技术的挑战
定位层面:当前的无人驾驶系统需要具备较高的定位精度和系统鲁棒性。露天矿场景下信号传播环境复杂,且作业环境动态变化,在传统静态RTK基站及4G5G基站建设的基础上,需增加补盲基站及移动基站以保证足够的信号覆盖;另一方面,高精地图为无人驾驶系统提供定位基线,高精地图需动态更新以适应采排环境的变化。
感知层面:矿山车辆运输过程中或产生大量扬尘,须通过前置的信号处理方法过滤相关的干扰信号,且通过AI点云数据聚类等算法移除扬尘遮挡数据,从而降低对障碍物的误识别;另一方面,相比较开放道路场景下车道线、交通标识信号灯等丰富的语义信息,矿山场景下的环境感知算法更多依赖对原始信号中的结构化信息,从而构建出虚拟的环境语义;在感知融合方面,颠簸的路面容易造成传感器相对位置的偏移,需要通过在线数据标定保持空间对齐关系。
规划层面:露天矿采排过程中采装区域及排土区域随着作业进程不断变化,规划算法需具备足够的自适应性以优化矿山车辆在采装区域及排土区域的整体作业效率;在多场区多编组的混合作业场景中,需设计动态路口管控、区域管控等规划算法保障行车安全,并通过车铲协同动态调度算法优化优化系统整体运行效率。
控制层面:矿山内部的道路环境复杂多变,存在装载和排土等不同的场景,需要无人驾驶系统能够快速响应环境变化,做出精准控制,确保行驶安全和稳定。
为了解决矿山场景中感知方面的挑战,路凯智行采用以下措施:多传感器融合:利用多种传感器,如激光雷达、摄像头、毫米波雷达传感器等,对矿山无人驾驶运行场地周围环境进行多角度、全方位的感知,通过融合多种传感器数据来提高感知精度和鲁棒性。多算法技术融合:采用传统算法和AI model融合算法,通过场景数据的驱动,提高了对复杂环境的识别和感知能力。实时更新地图:将传感器数据实时更新到地图中,利用地图对环境进行建模和分析,提高对环境的感知精度。同时,可以将地图与实时数据相结合,实现更准确、更可靠的环境感知。对于定位挑战,通过和合作伙伴一起努力,路凯智行制定了一套标准的基础设施建设流程,确保4G5G网络和RTK定位基站的稳定服务。另外在算法层面,将多种定位技术相结合使用,如惯导,视觉, 激光雷达等,通过融合多种定位数据来提高定位精度和鲁棒性。路径规划方面:根据场景挑选最合适的路径规划算法,根据实际情况灵活规划路径。同时,还将路径规划与环境感知相结合,根据实时数据动态调整路径规划;控制策略方面:利用先进的控制策略,如模型预测控制,快速响应环境变化,做出正确的决策。同时,还可以利用实时数据更新控制策略,以适应环境变化。
AI大模型与安全策略
发布会上,雷军提出用AI语音大模型赋能小米汽车,提升控车能力和驾驶体验。而实际上,路凯智行早已经将AI大模型引入矿山无人驾驶。视觉类的AI大模型方面,在AIGC概念提出之前,路凯智行的研发团队已广泛应用生成式神经网络(GAN)等技术手段增强图像、点云等感知数据集,用于对自动驾驶感知算法进行算法优化,提升算法在更加通用的矿山场景下的准确性、鲁棒性和稳定性,在路测的基础上提供了低成本的算法优化研发替代路径。此外,类ChatGPT的语言类AI大模型方面,路凯智行已在相关领域布局基础模型和工具链的研发,并在矿山制度管理、低代码数据分析等领域形成落地能力。在安全层面,小米汽车L2+级别的驾驶安全和路凯智行L4级别的生产安全,在不同维度对给自分别提出了要求。回归到露天矿实际生产场景,路凯智行安全策略是从车辆安全、系统安全、功能安全3个维度来达成一个目标:无人驾驶系统异常情况下保障无人驾驶的运输安全。
路凯智行的系统软件全部使用ISO26262功能安全流程和规范进行正向设计和开发,第三方的配件也严格按照功能安全的ASIL等级要求规范。对于系统故障或系统异常场景,路凯智行有着明确的定义、评判标准和评判机制。对于系统故障或系统异常发生的原因、概率和危害性,路凯智行也建立了相应的处理机制。并通过系统备份、系统监测、增加系统冗余、优化软件设计等方式来避免系统异常和系统故障的情况发生。
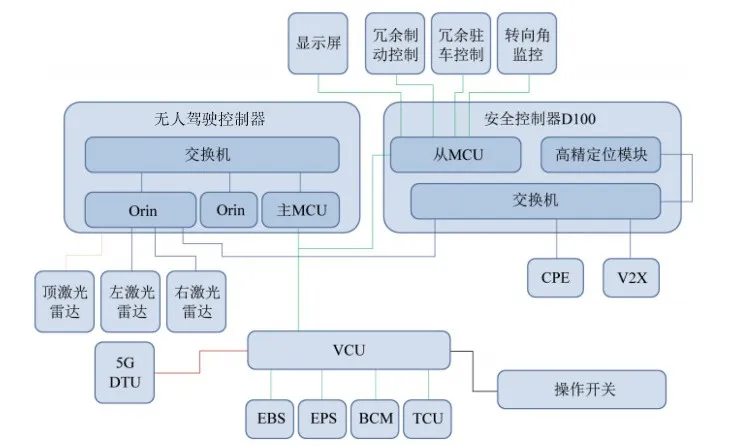
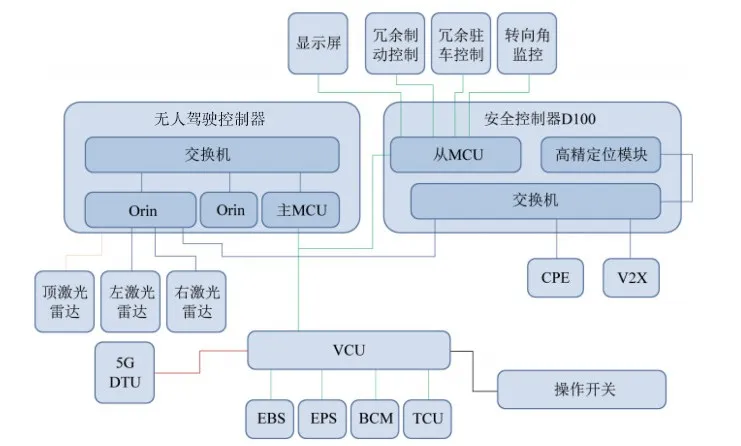
车辆方面,路凯智行的无人驾驶矿卡形成了以无人驾驶为核心的域集中式电气架构:以VCU−ACU−SCU构成设备与设备控制,形成安全闭环;底盘线控化和安全冗余从感知、定位、通信和EE架构到车控部件均采用安全流程正向设计,且冗余控制和监控接口均独立于主控系统,可在异常的情况下满足运输需求。正如雷军所言,新能源汽车已经从电机化迈向智能化。同样,矿山无人驾驶也已经从“下安全员”变成了运营效率的竞争。在这一阶段,考量的不再是无人驾驶技术,而是无人驾驶技术、AI大模型算法、智慧矿山系统、生产调度管理等多种技术或者系统方案的融合应用。雷军说,小米汽车力图构建“人、车、家”合一的互联生态,给予用户非凡的生态体验。这种构想和路凯智行从创立伊始就提出来的“懂车、懂矿、懂算法”存在某种意义上的不谋而合。只不过,在矿山场景下,路凯智行将其定义为线控智能整车、无人驾驶系统和智慧矿山系统的完美融合。
